Grabber Program
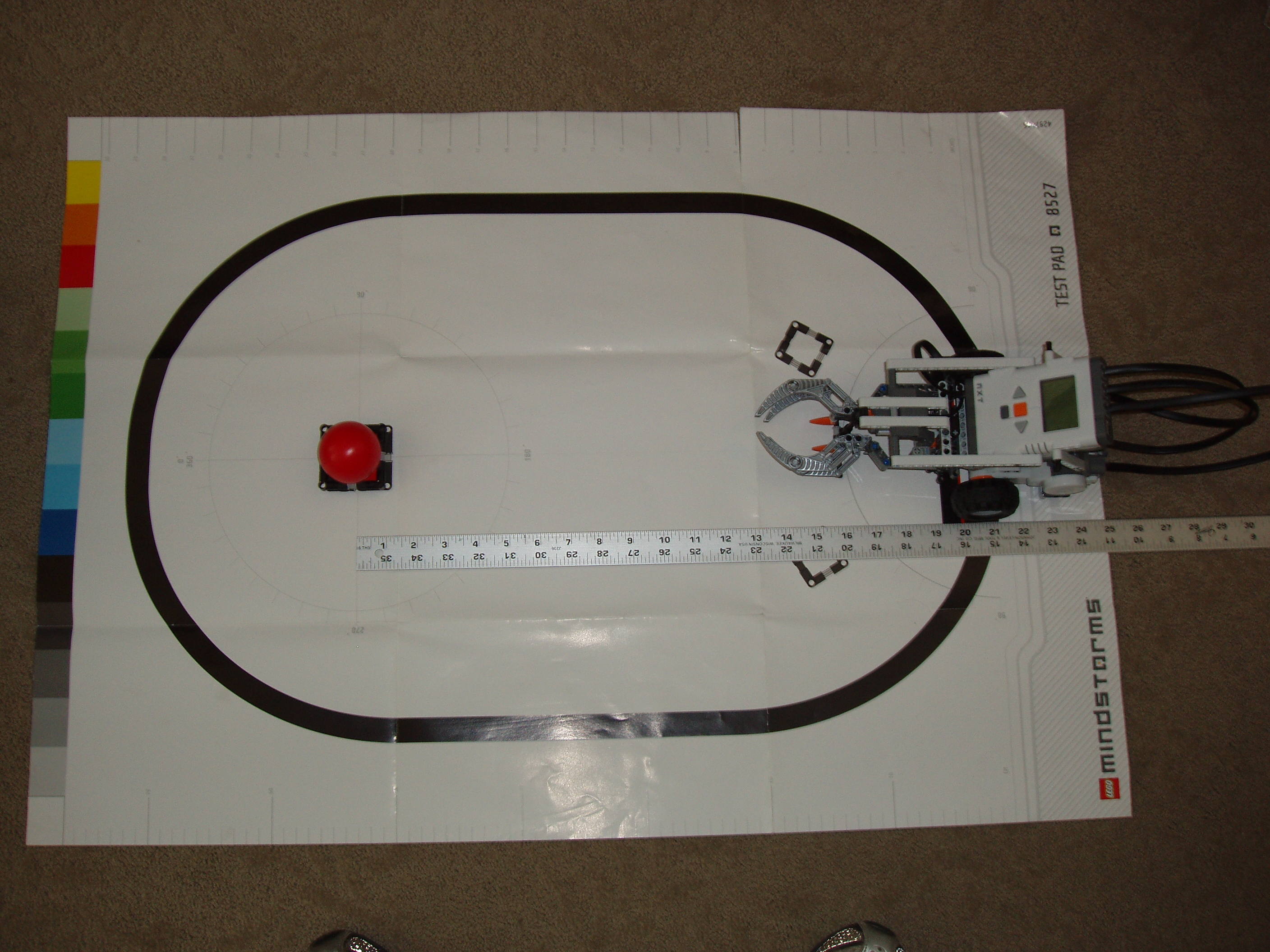
After charging the batteries, I decided to test my latest and greatest program. However, when I set the car on the floor, I realized I did not know how far away I had to put the grabber from the ball. This was because I no longer used the push of the touch sensor to open the grippers. Instead I had designed the robot to travel a set distance, three revolutions of the wheel, and then open the grippers. To figure out the distance I needed between the robot and the ball, I programmed the motors on the robot to make one revolution. I then measured the starting and ending point of the robot to determine the distance it traveled. Then, using the diagram supplied with the NXT kit, I measured the distance between the stand and the robot as shown in the diagram below.
As it turns out, the distance is two revolutions. Going back to the program I created, I changed the amount of revolutions for each motor to two. After making those changes I again tested the program. To my excitement, the grabber was able to grab the ball while only slightly moving the stand. Since the stand essentially stayed in place, the robot was able to drop the ball back on the stand on its return trip.
Considering where I started from, getting the “grabber program†to work was very rewarding. The time and effort put into it had lead to success. Overall, not only had I made a working program, but I had also learned how to use the NXT programming environment, the goal of this task.
Â