Today, I downloaded the NXT software and the updates to the software to my computer. Then, I briefly watched the provided tutorials to gain a general sense of how to use the NXT programming software. Once I became familiar with the programming package, the next challenge was to develop a working program. This proved challenging, yet rewarding.
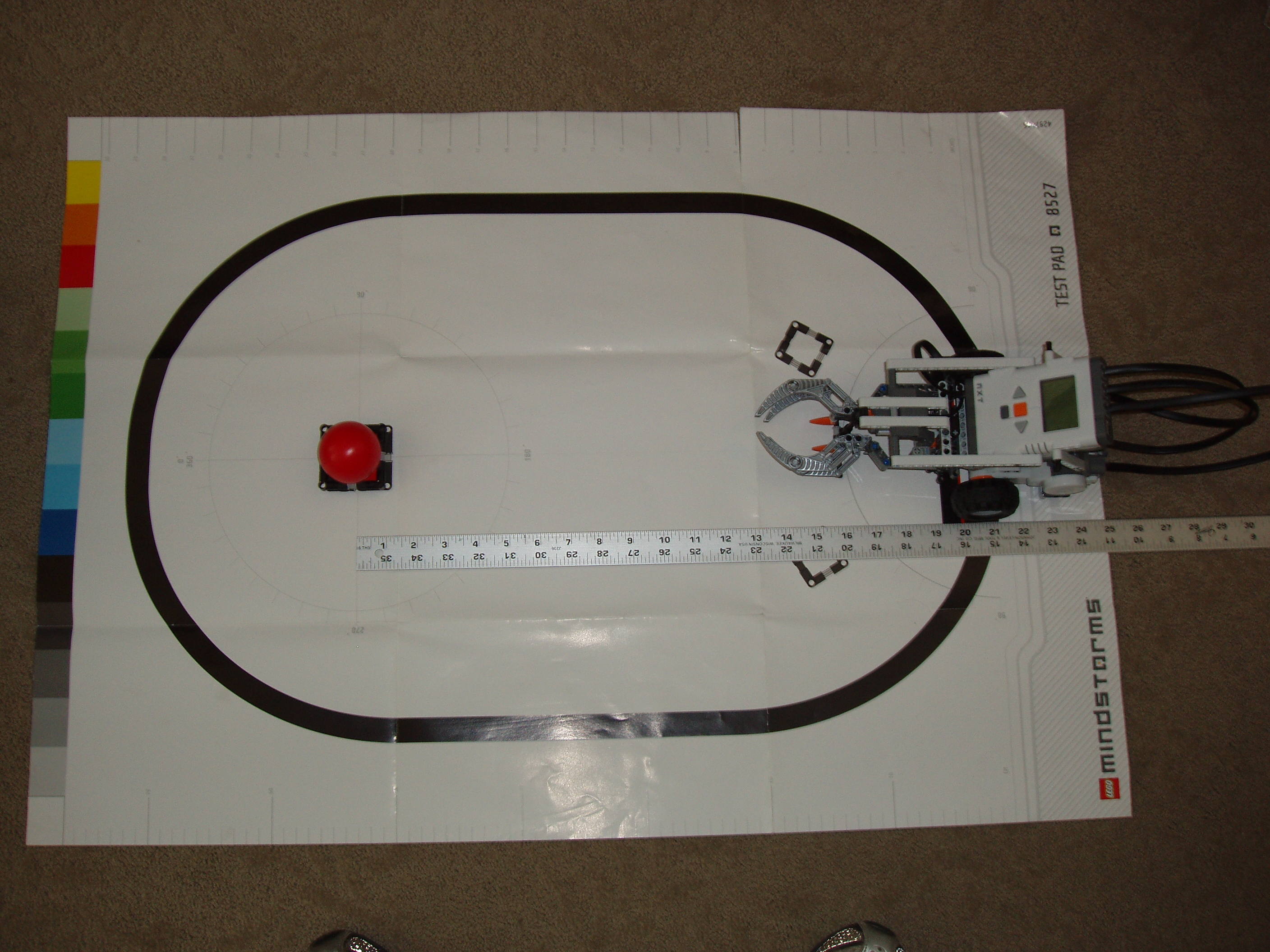
Since the ball retrieval device was already built, I decided to create a program for it. My thought was to make a program in which the ball retrieval device autonomously performed the following actions: open the device’s grippers, move forward until reaching a ball on a stand, grab the ball, close the grippers, move back, move forward, place the ball back on its stand, move back, and close the grippers. All in all, I wound up making three different programs. On the third try, I finally had a working program; however, it was far from perfect. As such, I began fine tuning the properties of the sensors.
The first problem I had to address was that the motors where moving too fast. To combat this problem, I lowered the speed of each motor from 75% to 50%. The next problem I faced was a result of a design flaw in the car itself. The part of the car used to grip the ball was very flimsy and, therefore, the ball would not always remain in the grippers. As such, I added some support to make the gripping device more rigid. The next challenge I faced dealt with the stand holding the ball. To my dismay, every time the car would bump into the stand, thereby activating the touch sensor on the car, it would cause the stand to change position. To try and combat this nuisance, I tried to tape the stand to the floor. However, this did not work that well. The next thing I tried to do was to put weights on either side of stand. Again this was a failure. To fix my problem I decided to change how the car operated. Instead of using the touch sensor to activate the grippers, I had the grippers close after it went three revolutions. This seemed like it would work much better. Unfortunately, just when I thought I had designed the ultimate program, the batteries died on me.